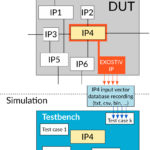
RTL or Netlist flow? EXOSTIV Dashboard Core Inserter and Exostiv Blade Core Inserter propose 2 alternate flows* for inserting EXOSTIV IP and Exostiv Blade IP into the target design: the ‘RTL flow’ and the ‘Netlist flow’. With the RTL flow, the IP is generated as a RTL
Read more →